SpatialOctree¶
Axom provides an implementation of the octree spatial index. The
SpatialOctree recursively divides a bounding box into a hierarchy of
non-intersecting bounding boxes. Each level of subdivision divides the bounding
box of interest along each of its dimensions, so 2D SpatialOctree objects
contain four child bounding boxes at each level, while 3D objects contain eight
children at each level.
The Octree class hierarchy is useful for building custom spatial acceleration
data structures, such as quest::InOutOctree.
The figure below shows the construction of several levels of a 2D octree.
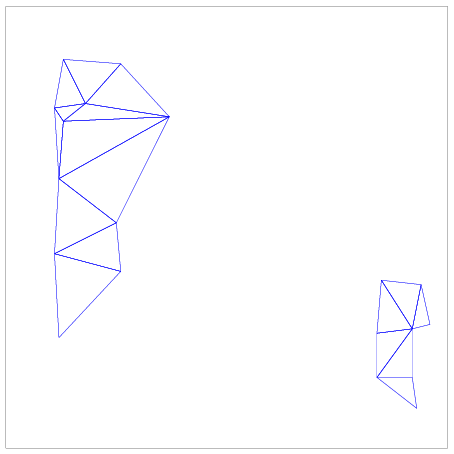
In contrast to a BVHTree, which computes a bounding box at each step, the octree structure begins with a user-specified bounding box.
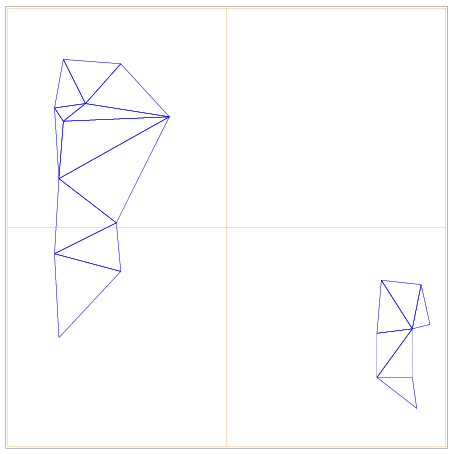
The octree divides all dimensions in half at each step.
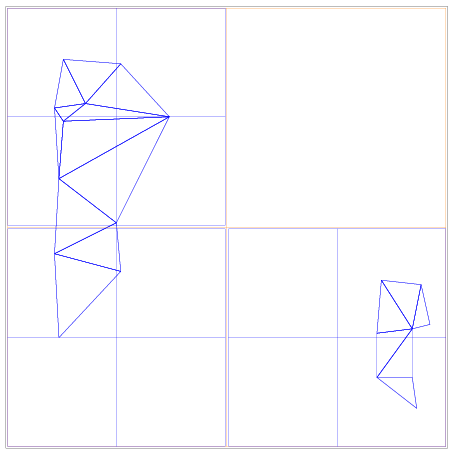
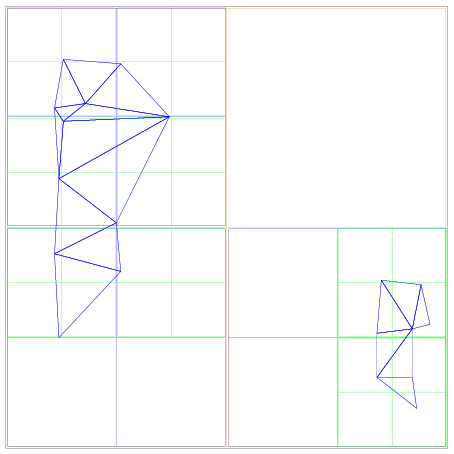
Similar to the BVHTree, the Octree divides a bounding box only if an object intersects that bounding box. In contrast to the BVHTree, the bounding box bins are non-intersecting, and division does not depend on the data in the bounding box. An \(N\)-dimensional octree divides into \(2^N\) bounding boxes at each step.
The following code example shows use of the SpatialOctree.
Include headers and define types:
#include "axom/spin/SpatialOctree.hpp"
using LeafNodeType = axom::spin::BlockData;
using OctreeType = axom::spin::SpatialOctree<in3D, LeafNodeType>;
using OctBlockIndex = OctreeType::BlockIndex;
using OctSpacePt = OctreeType::SpacePt;
using OctBBox = OctreeType::GeometricBoundingBox;
Then, instantiate the SpatialOctree and locate or refine blocks that contain
query points.
OctBBox bb(OctSpacePt(10), OctSpacePt(20));
// Generate a point within the bounding box
double alpha = 2. / 3.;
OctSpacePt queryPt = OctSpacePt::lerp(bb.getMin(), bb.getMax(), alpha);
// Instantiate the Octree
OctreeType octree(bb);
// Find the block containing the query point
OctBlockIndex leafBlock = octree.findLeafBlock(queryPt);
// and the bounding box of the block.
OctBBox leafBB = octree.blockBoundingBox(leafBlock);
for(int i = 0; i < octree.maxInternalLevel(); ++i)
{
// SpatialOctree allows a code to refine (subdivide) a block
octree.refineLeaf(leafBlock);
// and locate the (new) child block containing the query point.
leafBlock = octree.findLeafBlock(queryPt);
}
Unlike the BVHTree class, the SpatialOctree is intended as a building
block for further specialization. Please see the quest::InOutOctree as an
example of this.
Some ancillary classes used in the implementation of SpatialOctree include
BlockData, which ties data to a block; Brood, used to construct and
organize sibling blocks; OctreeBase, implementing non-geometric operations
such as refinement and identification of parent or child nodes; and
SparseOctreeLevel and DenseOctreeLevel, which hold the blocks at any one
level of the SpatialOctree. Of these, library users will probably be most
interested in providing a custom implementation of BlockData to hold
algorithm data associated with a box within an octree. See the
quest::InOutOctree class for an example of this.