Intersection¶
The intersection test is provided by intersect(). It takes two primitives
and returns a boolean indicating if the primitives intersect. Some overloads
return the point of intersection in an output argument. The overloads for
intersect() are summarized in the table below.
| Arg 1 | Arg 2 | Additional arguments and notes |
|---|---|---|
| Triangle | Triangle | include boundaries [1] (default false) |
| Ray | Segment | return intersection point. 2D only. |
| Segment | BoundingBox | return intersection point |
| Ray | BoundingBox | return intersection point |
| BoundingBox | BoundingBox | |
| Sphere | Sphere | specify tolerance |
| Triangle | BoundingBox | |
| Triangle | Ray | return parameterized intersection point (on Ray), return barycentric intersection point (on Triangle) |
| Triangle | Segment | return parameterized intersection point (on Segment), return barycentric intersection point (on Triangle) |
| OrientedBoundingBox | OrientedBoundingBox | specify tolerance |
| [1] | By default, the triangle intersection algorithm considers only the
triangles’ interiors, so that non-coplanar triangles that share two
vertices are not reported as intersecting. The caller to
intersect() can specify an optional argument to include triangle
boundaries in the intersection test. |
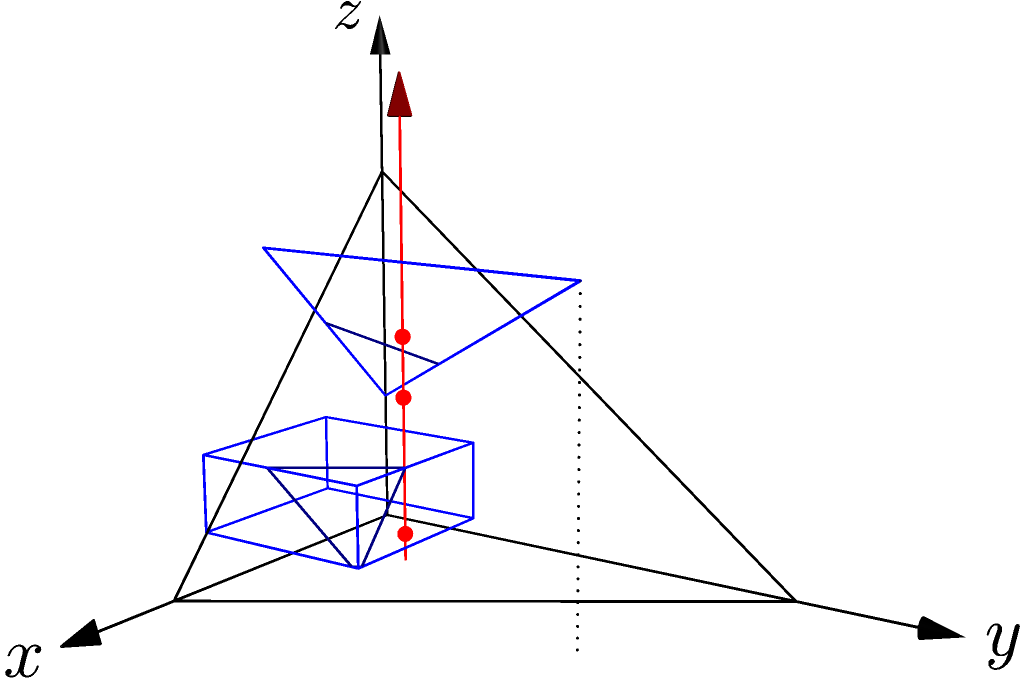
The example below tests for intersection between two triangles, a ray, and a BoundingBox.
#include "axom/primal/operators/intersect.hpp"
// Two triangles
TriangleType tri1(PointType::make_point(1.2, 0, 0),
PointType::make_point(0, 1.8, 0),
PointType::make_point(0, 0, 1.4));
TriangleType tri2(PointType::make_point(0, 0, 0.5),
PointType::make_point(0.8, 0.1, 1.2),
PointType::make_point(0.8, 1.4, 1.2));
// tri1 and tri2 should intersect
if(intersect(tri1, tri2))
{
std::cout << "Triangles intersect as expected." << std::endl;
}
else
{
std::cout << "There's an error somewhere..." << std::endl;
}
// A vertical ray constructed from origin and point
RayType ray(SegmentType(PointType::make_point(0.4, 0.4, 0),
PointType::make_point(0.4, 0.4, 1)));
// t will hold the intersection point between ray and tri1,
// as parameterized along ray.
double rt1t = 0;
// rt1b will hold the intersection point barycentric coordinates,
// and rt1p will hold the physical coordinates.
PointType rt1b, rt1p;
// The ray should intersect tri1 and tri2.
if(intersect(tri1, ray, rt1t, rt1b) && intersect(tri2, ray))
{
// Retrieve the physical coordinates from barycentric coordinates
rt1p = tri1.baryToPhysical(rt1b);
// Retrieve the physical coordinates from ray parameter
PointType rt1p2 = ray.at(rt1t);
std::cout << "Ray intersects tri1 as expected. Parameter t: " << rt1t
<< std::endl
<< " Intersection point along ray: " << rt1p2 << std::endl
<< " Intersect barycentric coordinates: " << rt1b << std::endl
<< " Intersect physical coordinates: " << rt1p << std::endl
<< "Ray also intersects tri2 as expected." << std::endl;
}
else
{
std::cout << "There's an error somewhere..." << std::endl;
}
// A bounding box
BoundingBoxType bbox(PointType::make_point(0.1, -0.23, 0.1),
PointType::make_point(0.8, 0.5, 0.4));
// The bounding box should intersect tri1 and ray but not tr2.
PointType bbtr1;
if(intersect(ray, bbox, bbtr1) && intersect(tri1, bbox) &&
!intersect(tri2, bbox))
{
std::cout << "As hoped, bounding box intersects tri1 at " << bbtr1
<< " and ray, but not tri2." << std::endl;
}
else
{
std::cout << "There is at least one error somewhere..." << std::endl;
}
In the diagram, the point where the ray enters the bounding box is shown as the intersection point (not the exit point or some point inside the box). This is because if a ray intersects a bounding box at more than one point, the first intersection point along the ray (the intersection closest to the ray’s origin) is reported as the intersection. If a ray originates inside a bounding box, the ray’s origin will be reported as the point of intersection.